




1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
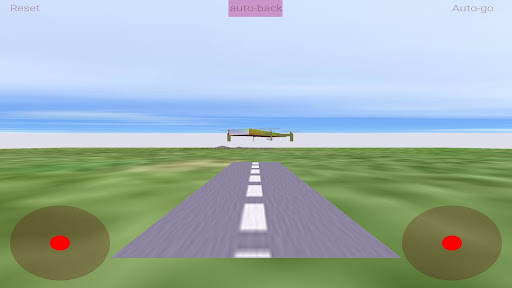
You can handle the drone in speed, height and rotation.
Auto-back to return to the initial position.
Auto-go to fly automatically.
Program:
Constants: pi and any int/floating number
Variables: u v
Operators: + - * / > < == & |
Functions: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponent)
The instructions to program
// For coments
speed= The horizontal speed.
speedh= The vertical speed.
ang= The horizontal angle.
wait= The wait interval.
reset The reset action.
autog The auto-go action.
autob The auto-back action.
For repetitive actions use do - enddo. See sample 5.